Hand and finger injuries account for nearly 50% of accidents in drilling industries, and manual rod-handling is a significant cause. Two Canadian companies have collaborated to make these injuries a thing of the past. The RodBot—a hydraulic rod-handling robot—is the result of a partnership between Ontario-based MedaTech and New Brunswick-based Major Drilling.
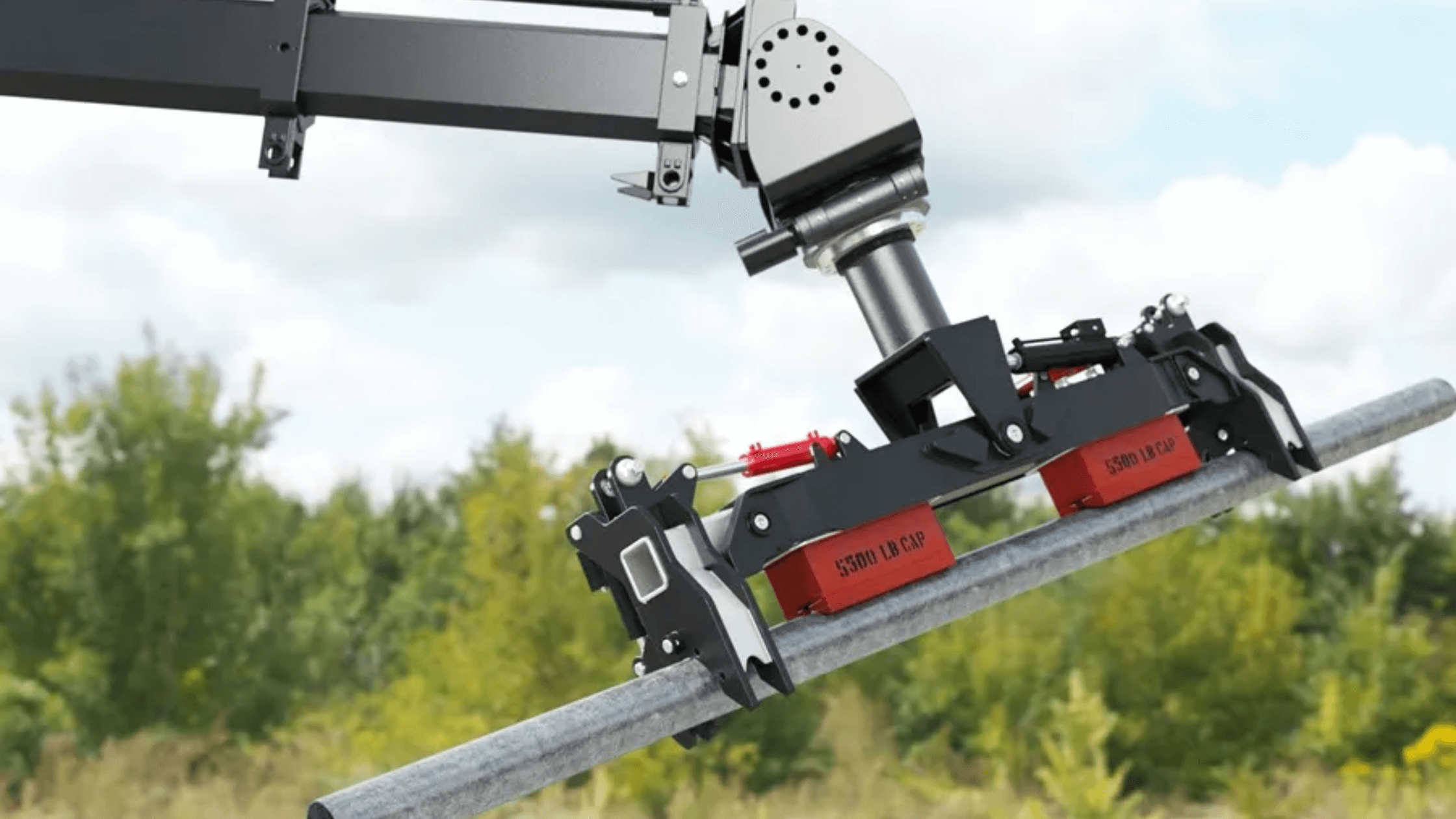
MedaTech explains that the RodBot is “a hydraulic robotic rod-handling system designed specifically for the seamless loading and unloading of drill rods and casing.” The RodBot can handle pipes up to 35 feet long and 12” in diameter, automatically picking up and loading them.
Operating the RodBot is simple and requires just one operator: program the positions for the drill mast and rod storage, then press “repeat,” and the RodBot takes care of the rest. This hands-free system allows for seamless rod loading without the risk of worker accidents or injuries.

The RodBot has three distinct joints and can be operated in three different modes:
- Joint control: The operator operates each joint on its own by using a joystick.
- Tip control: Using the joystick, operators can control the tip of the RodBot, moving it horizontally, vertically, and laterally while the software moves each of the joints as programmed.
- Semi-auto control: The operator sets the rod storage and drill mast positions, and the RodBot does the rest.
This handy rod-loading robot also comes in three different models tailored to different applications.
| RB1000 | RB2000 | RB3000 | |
| Max load/reach | 200 lbs, 15 ft | 800 lbs, 15 ft | 1200 lbs, 30 ft |
| Diameter | 2.5” to 5” | 3” to 8” | 5.5” to 12” |
| Mounting | Skid | Drill | Pipe tub |
| Powerpack | Powered off drill | Powered off drill | Plug-in electric with hydraulic power pack |
MedaTech was founded in 2003 and specializes in building mobile heavy equipment for several sectors, including energy, mining, construction, and transportation. Major Drilling was established in 1980 and is crucial in supplying materials for green energy solutions. The RodBot has been in development since 2021.

